摘要 摘要:针对矿井通风机倒机过程中存在的执行器饱和问题,将变结构 PID 抗饱和控制与非线性自适应控制相结合,设计了自适应 PID抗饱和控制器。基于带死区的投影算法建立矿井通风机
摘要:针对矿井通风机倒机过程中存在的执行器饱和问题,将变结构 PID 抗饱和控制与非线性自适应控制相结合,设计了自适应 PID抗饱和控制器。基于带死区的投影算法建立矿井通风机倒机过程线性和非线性模型;针对这2个模型,分别设计一个变结构 PID抗饱和控制器;计算线性和非线性自适应 PID 抗饱和控制器在不同状态下的运行评价指标,选择评价指标值较小的控制器用于该状态下的矿井通风机倒机过程控制。仿真结果表明,自适应 PID抗饱和控制器能够保证井下传输风量的平稳,很好地解决了执行器饱和问题。
关键词:矿井通风机;通风机倒机过程;自适应PID抗饱和控制器;变结构PID抗饱和控制;非线性自适应控制
0 引言
矿井通风机对煤矿井下作业和安全生产至关重要,煤矿通常配备成对的通风机,采用一备一用的工作模式。在矿井通风机倒机过程中,极易发生瓦斯超限现象。为了解决这个问题,众多研究者将注意力集中于通风机倒机控制上[1-3]。通风 机 倒 机 过 程控制方法主要分 为2类:① 基 于 模 型 的 控 制 方 法。文献[4]根据电路理论和通风机特性曲线得到井下风量与风阻的静态模型,并在此基础上设计了顺序控制策略,实现了井下风量的连续和平稳输送。文献[5]在建立通风机倒机过程非线性约束规划模型的基础上,通过数值求解得到需要的风门开度,达到控制井下 风 量 恒 定 的 目 的。上述方法都是开环控制,无法依据井下风量波动及时稳定输送风量,在倒机期间,不能保证瓦斯浓度低于警戒线。② 基于智能的控制方法。文献[6]利用专家经验,通过模糊控制算法对井下风量进行控制,但该算法论域的设置主要依赖于人工经验,导致算法具有一定主观性和随意性,因此常常不能取得令人满意的效果。此外,上述研究没有考虑矿井通风机倒机过程中存在的执行器饱和问题。执行器饱和问题在工业现场非常普遍,通常会恶化系统特性,甚至导致闭环系统不稳定。在矿井通风机倒机过程中,执行器饱和是指风门因物理条件限制而呈现饱和非线性特性。当饱和发生时,会不断加剧风 门 轴 承 的 损 伤,甚至引起通风机故障。因此,有必要采取措施来改变风门运行时的饱和线性特性,延长风门工作寿命。基于上述原因,本文设计了自适应 PID抗饱和控制器,通过合理的切换策略在线性控制器和非线性控制器之间切换,保证井下传输风量的平稳和井下作业的安全可靠。
1 通风机倒机过程离散化模型
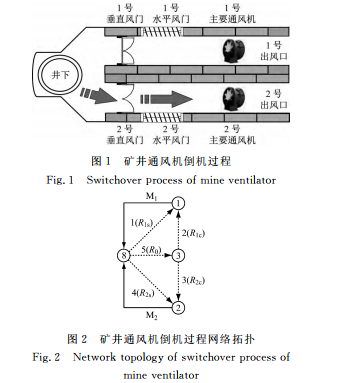
由于矿井通风机倒机过程的建模与倒机的次序无关,为论述统一,假设倒机次序为2号通风机切换到1号通风机上,切换过程如图1所示。由于出风口和进风口位能差很小,可以忽略不计,因而通风机倒机过程的进风口和出风口在同一平面上,可以将其合并为一点。为便于理解和分析建模过程,利用网络拓扑概念[7]简化井下通风结构,将通风机倒机过程简化为如图2所示的网络拓扑。图2中,R1s和R1c分别为1号 通 风 机 水 平 风 门、垂 直 风 门 的 风 阻,R2s和R2c分别为2号通风机水平风门和垂直风门的风阻,R0 代表 井 下 风 阻,M1 和 M2 分别 为 1 号 和2号通风机。
根据图2和流量平衡方程[8],建立1—5网络分支的风道动态方程:dQjdt+KjLj|Qj|Qj = KjHj (1)式中:j为风道号,j=1,2,…,5;Qj 为第j 风道的输送风量;Kj,Lj 和 Hj 分别为输送过程中的惯性系数、空气阻尼系数和压降。根据通风机输送过程中涉及的压力平衡方程,构建风力传输数学模型:Hpm =-Hpd +RpmQpm p =1,2 (2)式中:Hpm和 Hpd分别为p 号主要 通 风 机 的 压 降 和压头;Rpm 和 Qpm 分别 为 p 号主要通风机的风阻和风量。根据文献[9],利用基尔霍夫风压、风量定律,得到描述通风机切换控制过程的状态方程:x(t)=Acx2cDu(t)+Aca(x2+x3)2R0+Bcx(t)+Ccd(3)y(t)=cx(t) (4)式中:x(t)=[x1 x2 x3 x4]T,是过 程 控 制 系 统的状态,x1,x2,x3,x4 分别 为 通 过1号 通 风 机 水 平与垂直风门的风量和2号通风机垂直与水平风门的风量;Ac=- K-1c +ETQcK-1( a EQc)-1,EQc为流量平衡方程相 关 的 常 数 矩 阵,Kc =diag(K1 K2 K3 K4),Ka=K5,K1—K5 分别对应1号通风机水平与垂直风门、2号通风机垂直与水平风门和井下分支的惯性系数;x2cD=diag(x12 x22 x32 x42);u(t)=[R1 R2R3 R4]T,是过程控制输入,其中 R1=R1s,R2=R1c,R3 = R2c,R4 = R2s;Aca = KcETQc (EQcKcETQc+Ka)-1Ka,Cc=(K-1c +ETQcK-1a EQc)-1;Bc=-(K-1c +ETQcK-1a EQc)-1SQc,SQc为回 路 电 压 方 程 相 关 的 常 数矩阵;y(t)是 控 制 系 统 的 输 出,c=eye(4);d=[H1d H1d H2d H2d]T。设定采样时间为0.0001s,对上述动态方程离散化,得到非线性自回归滑动平均模型:y(k+1)=-A珚(z-1)y(k)+B珚(z-1)u(k)+B珛(z-1)u(k)+v[x(k)] (5)式中:A珚(z-1)、B珚(z-1)和B珛(z-1)为非线性自回 归 平均模型的系数矩阵;y(k)和u(k)分别为系统的输出和输入;v[x(k)]为一个未知的连续可微的矢量值非线性函数。矿井通风机倒机过程线性模型为y1(k+1)=-A珚(z-1)y1(k)+B珚(z-1)u(k)+B珛(z-1)u(k) (6)矿井通风机倒机过程非线性模型为y2(k+1)=-A珚(z-1)y2(k)+B珚(z-1)u(k)+B珛(z-1)u(k)+v[x(k)] (7)
2 自适应PID控制器抗饱和设计
建立带有 未 建 模 动 态 补 偿 器 的 增 量 式 PID 控制器,其结构为u(k)=u(k-1)+KP[e(k)-e(k-1)]+KIe(k)+KD[e(k)-2e(k-1)+e(k-2)]-H珢(z-1)u(k)-K珚(z-1)v[x(k)] (8)式中:KP、KI 和 KD 为 对 角 矩 阵,各 对 角 元 素 为 常量,分别对应于控制器的比例、积分、微分环节的系数;e(k)=r(k)-y(k),其中r(k)为系统参考输入;H珢(z-1)用于控制器的解耦补偿;K珚(z-1)提供未建模动态补偿。为便于后续分析,将控制器各环节增益参数重新定 义 为 如 下 形 式:KP = -λ(G1 +2G2 );KI = λ(G0+G1 +G2);H珢(z-1)= (1-z-1)B珚-1 (z-1)· B珛(z-1);K珚(z-1)= (1-z-1)B珚-1 (z-1);KD =λG2。参数间的关系满足式(9):det{H珡(z-1)A珚(z-1)[I+B珚-1(z-1)B珛(z-1)]+z-1 λB珚(z-1)}≠0 |z|≥1 (9)式中:I为单位矩阵;λ为常系数。向控制器中添加反馈抗饱和增益来抑制饱和输出,改善后的 PID控制器结构如下:u(k)-u(k-1)=KP[e(k)-e(k-1)]+KD[e(k)-2e(k-2)+e(k-1)]+KIKf(us-u(k)) (10)式中:Kf 为反馈抗饱和增益;us=sat(u(k))。当系统 模 型 参 数 未 知 时,将 带 死 区 的 投 影 算法[10-11]加入其中:^Θ(k)=^Θ(k-1)+ α(k)Φ(k-1)eT(k)1+ΦT(k-1)Φ(k-1)(11)
α(k)= 1 e(k) >4Δ {0 其他 (12)式 中:Θ = [-A1,-A2,…,-Ana ,B0,B1,…,Bnb ]T,^Θ (k)为 k 时 刻 Θ 基 于 模 型 的 估 计 值; Φ(k)=[yT(k),…,yT (k-na +1),uT (k),…,uT(k-nb)]T,na 和nb 为系统阶数;Δ 为给定常量。在线性估计模型中,e(k)为e(k)=y(k)-^y1(k)=y(k)-ΦT(k-1)Φ(k-1)(13)在非线性估计模型中,e(k)为e(k)=y(k)-^y2(k)=y(k)-ΦT(k-1)Φ(k-1)-^v[x(k-1)](14)式中:^y1(k)和^y2(k)分别为线性模型和非线性模型的输出估计值;^v[x(k-1)]为神经网络估计值。线性自适应抗饱和控制器的离散形式为u(k)-u(k-1)=KP[e(k)-e(k-1)]+KD[e(k)-2e(k-2)+e(k-1)]+KIKa(us-u(k))-H珢(z-1)u(k)(15)非线性自适应抗饱和控制器的离散形式为u(k)-u(k-1)=KP[e(k)-e(k-1)]+KD[e(k)-2e(k-2)+e(k-1)]+KIKa(us-u(k))-H珢(z-1)u(k)-K珚(z-1)^v[x(k)] (16)线性自适应抗饱和控制器和非线性自适应抗饱和控制器之间的切换策略:利 用Ji(k)|i=1,2权衡 线性自适应 PID 抗饱 和 控 制 器 和 非 线 性 自 适 应 PID抗饱和控制器在不同状态下的运行评价指标,将二者进行对比,选择评价指标值较小的控制器用于该状态下的矿井倒机过程控制。Ji(k)计算公式为Ji(k)= ∑ k ρ=1 αi(ρ)ei(ρ)22(1+ΦT(ρ-1)Φ(ρ-1))+h ∑ k ρ=k-N+1(1-αi(ρ)ei(ρ)2) (17)式中:N 为正整数;h为给定常量。
3 仿真分析
3.1 系统参数设置
仿 真 中 涉 及 的 过 程 参 数 如 下:R1m =1.0277kg/m7,R2m = 1.027 7 kg/m7,R0 =0.16kg/m7,K1=K2=K3=K4=0.3,K5=0.017。本文的控制目的是保证通风机切换期间井下传输的风量平稳,从而在一定程度上确保瓦斯浓度不超出限值。为了实现这个目的,需用平稳且合适的井下风量来满足矿井通风的要求,并保证2台矿井通风机安全运行。此外,所设计的控制器应能很好地消除饱和效应对闭环系统的影响。借助固定极限流量的概念,提出了一种有效可行的喘振避免策略:通过矿井通风机的风量保持不变,只改变通风机的转速来调 节 压 头。这种策略在工程应用中易于实现,且具有节能的作用。
通过4个风门的参考风量设置如下:x1r(t)|m3/s=x3r(t)|m3/s=19.0275-18.0275×sin πt100 0≤t<50s1 t≥ 烅烄烆 50s(18)x2r(t)|m3/s=x4r(t)|m3/s=18.0275×sin πt100+1 0≤t<50s73.44 t≥ 烅烄烆 50s(19)实际通风机 倒 机 过 程 中,2台通风机的压头可以认为固定不变,所以假设参数 H1d和 H2d恒定,其方程如下:H1d|Pa=173.3529×sin πt100+206.6471 0≤t<3s0.087t2-9.7124t+408.3529 3s≤t<50s120.5590 t≥ 烅烄烆 50s(20)H2d|Pa=-0.0453t2+3.5845t+138.6712 0≤t<50s {204.7593 t≥50s(21)根据实际通风机倒机过程,其初始状态参数可设置为x(0)= [19.1275 1 19.0275 1]T。此外,井下 输 送 风 量 Q5 由 Q2 和 Q3 共同 决 定 的,而Q1m和Q2m分别提供Q1 和Q2 与Q3 和Q4。
3.2 神经网络参数配置
矿 井 通 风 机 倒 机 过 程 模 型 是 一 个 离 散 形 式 的4输入、4输出的非线性系统。神经网络算法可使系统输出很好地跟随输入信号,在保证矿井通风机安全稳定倒机和运行的前提下,既维持井下风量稳定,也满足矿井通风设定值的实际需求。神经网络参数配置:学 习 率 为 0.6,隐 含 层 节 点 数 为 8,Δ=0.3。在实际矿井通风要求中,理想的风量设定值为 Q5=20.0275m3/s。为了便于分析,定义线性估计模型的输出、输入变量为yg(t)和ug(t),g=1,2,3,4。y珔g(t)和u珔g(t)为整 个 系 统 的 实 际 输 出 和 输 入,wg 为系 统 的 参 考输入。
3.3 仿真结果分析
切换系统(线性和非线性估计模型组成)的输出如图3所示(step为步长,乘以采样时间就是倒机时间)。从图3可以看出,在48s的时候,由于物理条件的限值,风门发生了饱和现象。当执行器发生饱和时,系统输出常常会偏离参考输入,即导致井下风量波动较大。在抗饱 和 控 制 器 下 切 换 系 统 的 输 入 如 图 4所示。图4显示了通风机倒机过程中4个风门的切换过程。当风阻接近于零时,代表风门是全开的;当风阻接近于120kg/m7 时,代表风门是全关的。
在抗饱 和 控 制 器 下 切 换 系 统 的 性 能 如 图 5所示。从图5可以看出,在自适应 PID 抗饱和控制器下,井下风量仍然可以很好地跟踪参考值,满足矿井通风的设定要求。但是,通过矿井通风机的风量偏离比较大。本 文 设 计 的 重 点 是 保 证 井 下 风 量 的 平稳,只需保证通过矿井通风机的风量大于其喘振风量即可。从图5可知,所设计的控制器能够满足上述要求,且很好地解决了饱和问题。切换有时会恶化系统的性能,这是因为大部分时间是非线性自适应 PID抗饱和控制器在工作(图6),虽然其 能 改 善系统性能,但为了保证系统稳定性,需将其切换到线性自适应控制器。
4 结语
介绍了矿井通风机切换原理,利用网络拓扑概念简化井下通风结构,给出了矿井通风机倒机过程网络拓扑,并建立了线性模型和非线性模型;设计了线性自适应抗饱和控制器和非线性自适应抗饱和控制器及其切换策略。仿真结果表明,自适应 PID 抗饱和控制器能够保证井下风量的平稳,很好地解决了执行器饱和问题。
参考文献(References):
[1] 于励民,马小 平,任 中 华,等.矿井主通风机不停风倒机控制的研究 与 实 现[J].工 矿 自 动 化,2010,36(9):133-137. YULimin,MA Xiaoping,REN Zhonghua,etal.Research of switching ventilator control withoutblowing-out of main ventilator of mine and itsimplementation[J].Industryand Mine Automation,2010,36(9):133-137.
[2] 王前 进,马 小 平,张 守 田.PLC 软冗余在通风机监 控系统中的应用[J].工矿自动化,2014,40(1):93-96. WANGQianjin,MA Xiaoping,ZHANG Shoutian.ApplicationofPLCsoftredundancyinmonitoringandcontrolsystemforventilator[J].Industryand MineAutomation,2014,40(1):93-96.
[3] 马小平,吴新忠,任子晖.基于移动互联的煤矿通风机远程监控技术[J].工矿自动化,2016,42(3):7-12. MAXiaoping,WU Xinzhong,REN Zihui.VentilatorremotemonitoringtechnologyofcoalminebasedonmobileInternet[J].Industryand MineAutomation,2016,42(3):7-12.
矿井通风机倒机过程自适应PID抗饱和控制器设计相关论文期刊你还可以了解:《矿井火灾事故救援技术分析及发展趋势探讨》
转载请注明来自:http://www.lunwenhr.com/hrlwfw/hrgylw/11410.html