摘要 摘要:为了解决内燃机叉车工作效率低、对环境产生污染,电动叉车充电时间长、工作时间短的问题,在综合比较分析各种动力组合与驱动形式利弊的基础上,提出了一种燃料电池混合
摘要:为了解决内燃机叉车工作效率低、对环境产生污染,电动叉车充电时间长、工作时间短的问题,在综合比较分析各种动力组合与驱动形式利弊的基础上,提出了一种燃料电池混合动力叉车结构.针对燃料电池混合动力叉车的驱动系统,分别阐述了电池SOC控制和电池电压控制的能量管理策略,并通过仿真对控制方案进行了解释和验证.仿真结果表明:在不同的操作环境和电池状态下电池电压控制更好的满足叉车驱动系统的控制要求,可以更有效地抑制直流总线电压过冲.
关键词:燃料电池;电池;叉车;转换器;控制
0引言
随着柴油和液化石油气等化石燃料变得更加稀缺和昂贵,由可再生资源生产的氢气作为一种补充能源使持续供给成为可能[1−3].质子交换膜燃料电池由于其零排放、工作温度低和功率密度高的优点被认为是应用在汽车上的最佳选择[4,5].在电动汽车中燃料电池既可以作为独立的系统,也可以与蓄电池或超级电容器等其他能量源进行混合使用.混合动力可以显著提高整个动力系统在不同方面的性能,如可以降低燃料电池成本,将燃料电池从负载波动中分离以及利用牵引电机进行再生能量回收.因此,燃料电池混合动力转换系统非常适用于平均功率需求较低同时负载动态相对较高的地方[6−8].
叉车作为一种重要的物料搬运车,被广泛应用于仓库、配送中心等各种场所.近年来,燃料电池在叉车驱动系统中的应用被认为是一个潜在的短期市场.从低排放的角度来看,由于叉车的环保和二氧化碳减排所带来的效益要比汽车大的多,所以燃料电池在叉车上的使用也比汽车更集中,使用氢气作为燃料的叉车每辆一年减少的二氧化碳排放量相当于大约八辆汽车一年的二氧化碳排放.此外,叉车经常被用于氢燃料补给站和基础设施集中的局部地区.除了对环境友好,氢气相对于柴油和压缩天然气有更高的利用率,这也极大地降低了运营成本.另一方面,燃料电池驱动叉车的寿命是蓄电池驱动叉车寿命的三倍,从而可以消除因更换电池而产生的能量损失.叉车在整个运行过程中,燃料电池可以产生恒定的电压并保持恒定功率的输出.叉车操作员可以通过位于仓库中的氢气站方便灵活地补充氢气,在3分钟或更少的时间内为他们的叉车加注燃料.
通过阅读查阅文献,发现只有很少的论文能解决燃料电池与蓄电池混合动力叉车动力系统的问题.有些针对叉车系统的文献,研究了两种三方混合动力系统,包括燃料电池、电池和超级电容器[9].仿真结果表明,使用了超级电容器的动力系统,燃料电池的负载变化显著降低.但超级电容器的使用将会增加系统成本和系统控制的复杂性[10,11].
本文对燃料电池与蓄电池混合动力叉车的动力系统进行了研究和开发.低温的质子交换膜燃料电池能够输出平均负载功率,并在蓄电池剩余电量不足时给蓄电池充电,而蓄电池将处理所有的负载变化以增加系统的动态响应同时保护燃料电池防止电压过高.本文设计了燃料电池和蓄电池混合动力叉车的结构,对燃料电池系统、电池系统和直流-直流变换器等主要单元的特性进行分析,然后分别阐述了电池和电压控制的能量管理策略,并通过仿真验证该策略,最后通过给出的实验结果验证分析和设计的有效性.
1燃料电池混合动力叉车结构
本文所设计的燃料电池混合动力叉车动力,系统结构如图1所示,叉车由燃料电池与蓄电池混合动力驱动采用燃料电池作为主动力源,蓄电池作为辅助动力源,在燃料电池预热阶段和所有动态过程提供动力.燃料电池与蓄电池混合系统的技术规格如表1所示.
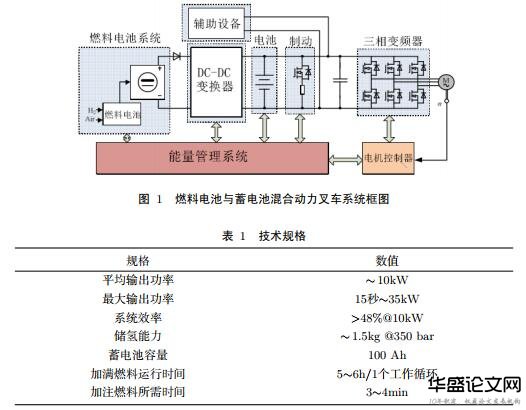
1.1燃料电池系统
在这种混合动力系统中,燃料电池仅向负载提供平均功率,并且当蓄电池的SOC(电池剩余电量,代表的是电池使用一段时间或长期搁置不用后的剩余容量与其完全充电状态的容量的比值,常用百分数表示)较低时向蓄电池组充电.燃料电池的输出电压和输出电流的关系曲线如图2所示.一般来讲,对于燃料电池本身输出功率越低,效率越高.然而,设备的平衡使燃料电池系统在低功率下运行效率低,因此燃料电池系统将在没有任何功率输出的情况下变为待机状态以保持相对较高的系统效率.此外,为了避免高电压造成的损害,燃料电池只能在满功率到总功率20%的区间中运行.

1.2电池
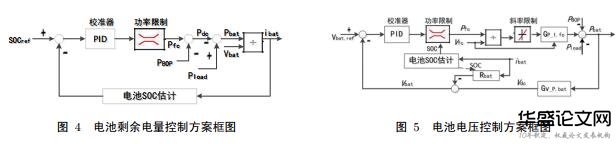
在燃料电池启动或者叉车起升、加速、再生制动等负载变化引起电流快速变化时,蓄电池被用来提供负载变化所需功率.在实际试验中,有7个100Ah的铅酸电池连接在直流母线上.在仿真中,电池的瞬时SOC用估算方法估计出来,即通过电池初始的电量减去电池的电流的积分即用掉的电量.
式中ηbatt代表电池效率,在充电和放电过程中,电池效率的定义不同;C代表标准电池容量;ibatt为瞬时电池电流.
1.3DC-DC变换器
由于燃料电池的可变输出电压以及可变直流母线电压(电池电压),需要一个能提高或降低其输出电压的DC-DC变换器来调节和管理燃料电池系统的输出功率.实际试验中有10个分离的直流转换器单元[12,13],用一个特殊的方式连接在一起以调节燃料电池的输出电压与蓄电池电压相匹配.这里的DC-DC变换器采用平均电流控制,所以从系统控制的角度来看,带有DC-DC变换器的燃料电池可以看成是可控电流源.
2混合动力系统能量控制策略
一般来说,燃料电池驱动叉车的控制系统可以分为三层:
(1)组件层:燃料电池设备平衡管理、DC-DC转换器调节、蓄电池充电控制、牵引和液压泵电动机控制以及制动电阻控制.
(2)电力/能量管理层:这一层主要用来实现电池剩余电量的控制,燃料电池的输出功率,以及负载和能源之间的能量平衡.
(3)监管层:它包括用户界面、通信、系统监控和保护.
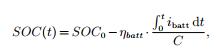
关于燃料电池混合驱动叉车功率调节的简化框图如图3所示.燃料电池作为一个交互的电力调节系统来使用,这样燃料电池就可以免受任何负载动力的损害.在这个图中不同的能量被定义并表示(PBOP代表辅助设备的功率,Vfc代表DC-DC变换器的电压,ifc代表DC-DC变换器的电流,Pfc代表燃料电池的功率,Pdc代表DC-DC变换器的功率,Pload代表负载所需功率,Pbat代表蓄电池的功率).以下是两种不同能量控制策略的研究.
2.1SOC控制方案
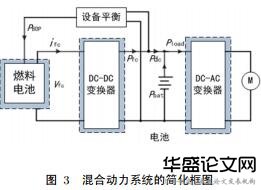
如图4框图所示(Pfc代表燃料电池的功率,Pdc代表DC-DC变换器的功率,PBOP代表辅助设备的功率,Pload代表负载所需功率,Pbat代表蓄电池的功率,Vbat代表蓄电池的电压,ibat代表蓄电池的电流),无论叉车负载功率是多少,控制器依据SOC实际值和SOC参考值决定是否进行再生能量回收或燃料电池是否来给电池充电:如果SOC低于SOCref,叉车进行再生能量回收,电池充电电流参数为正值,燃料电池给电池充电,所请求的充电功率被转化为燃料电池的功率/电流参数,并且在SOC过低时要求更高的功率,反之亦然;如果SOC高于SOCref,燃料电池电流/功率参数降低为零.因此,负载中瞬时状态的变化改变了燃料电池的功率参数.然而由于燃料电池的设备平衡,燃料电池不能有效地响应瞬态条件,因此蓄电池提供所有的负载变化所需能量.
2.2电池电压控制方案
在这个方案中,添加了电压控制回路,如图5所示(Pfc代表燃料电池的功率,Vfc代表燃料电池的电压,PBOP代表辅助设备的功率,Pload代表负载所需功率,Pbat代表蓄电池的功率,Vbat代表蓄电池的电压,ibat代表蓄电池的电流,Vdc代表DC-DC变换器的电压),GPI,fc和GvP,bat分别代表从燃料电池电流到功率和从电池功率到电压的转换函数.电池的开路电压和内部电阻Rbat是剩余电量SOC的函数,此函数可以由制造商提供的数据确定.通过电压控制,电池电压的反馈回路会有效地补偿电池电压下降;车辆当前能量消耗的前向反馈可以确保对急剧能量消耗的快速计算.电压控制就是根据电池实际电压和动态的参考电压Vref,bat决定燃料电池是否给电池充电或进行再生能量回收,电池参考电压较低时,允许更多的再生能量被输送到电池或燃料电池给电池充电;车辆不运动,参考电压较高时,不会进行再生能量回收,同时燃料电池也不会给电池充电.对于燃料电池,需要一个转换速率的限制功能;在控制器的每次初始化之前,根据一个在一定电流范围内离线定义的允许电流斜率表重新计算堆栈功率输出的一组边界,以保证燃料电池在最大效率点附近工作.
3仿真实验与结果分析
3.1仿真模型的建立
根据燃料电池混合动力叉车的结构、整车参数以及所匹配的主要部件的参数和工作原理,建立基于Matlab/Simulink的如图6所示的燃料电池混合动力叉车整车前向仿真模型.整车仿真模型包括动力系统模型(燃料电池、蓄电池、DC-DC变换器、电机)、驾驶员与循环工况模型、整车动力学模型、起升装置模型和整车控制器模型.对于整车控制器模型,分别建立了基于SOC控制的控制器模型和基于电压控制的控制器模型;在其他模型等条件相同的情况下,分别使用两种控制器模型进行仿真,以此对SOC控制和电压控制策略进行分析,仿真所需的整车参数如表2所示.
3.2仿真循环工况
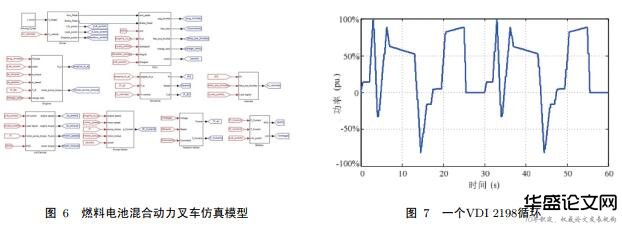
VDI代表“德国工程师协会”,其制定的循环工况是比较不同叉车燃料消耗的公认标准.VDI循环是叉车必须在规定的时间内完成一组任务的情况下定义的物理轨迹.然而,在实际操作中,叉车不同的使用方式通常会产生不同的影响,特别是驾驶员操作方式所带来的影响.VDI循环用来在仿真中模拟负载变化,比较不同的系统控制方案.一个VDI2198循环的功耗简图如图7所示.
3.3仿真结果分析
基于SOC控制的仿真结果如图8和图9所示.具体来说,图8上半部分显示的分别是恒定不变的SOCref和调整后不断变化的SOC;图8下半部分显示的是负载功率Pload,电池功率Pbat,燃料电池功率参数(虚线)和燃料电池实际输出功率Pfc.我们可以看到,由于燃料电池的最大缓变率有限,燃料电池功率的参考值和实际输出之间有明显的差别,这限制了燃料电池的动态响应,但有效地提高了燃料电池的寿命.蓄电池组作为功率缓冲单元,用来补充所需负载功率和实际燃料电池功率之间的功率差,从而对混合系统进行调节,SOC也会被完全控制.此外,监管系统还可以对参考信号的变化做出反应,如图9所示的仿真结果,当SOCref从0.5跃升至0.8,电池的SOC也会跟随SOCref变化而变化.
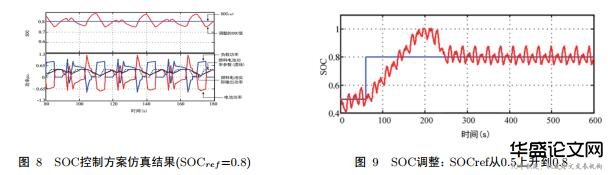
然而,这种SOC控制策略的缺点是:1)只是将剩余电量定义为允许充电的唯一因素,忽略了温度、分层和硫酸盐化作用等重要因素的影响;2)剩余电量的估计不够可靠.这种控制的有效性很大程度上取决于实际的电池剩余电量的估计,但在叉车上使用电池时,很难精确估计出剩余电量;3)根据负载情况的不同,电池电压会有很大的起伏,这对电池的使用是有害的.从图8中可以看出,由于燃料电池的响应迟缓,仿真结果并不理想,来自负载的再生能量和来自燃料电池的能量导致电池的电压很高,而电池电流却不能快速下降.因此,在实际中,需要使用电池电压控制.
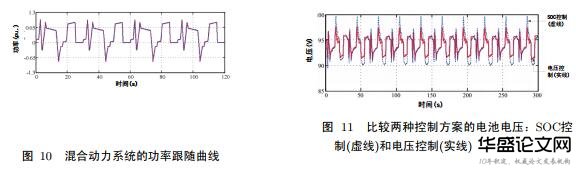
基于电压控制的仿真结果如图10所示,满足负载功率和混合动力系统输出功率平衡这一个基本要求,同时验证了该控制方案的有效性.与SOC的控制方法相比较,从图11所示的波形图中可以看出电池电压的过冲和下冲受到限制.但电池SOC控制比电池电压控制有更严重的变化,唯一可以调节电池电压的控制自由度是燃料电池输出功率,这意味着燃料电池必须提供一些动态响应来调节电池电压;否则不能满足功率平衡的要求.由于这个原因,在电压控制中比在SOC控制中能更好的利用燃料电池上下电流斜率限制功能.
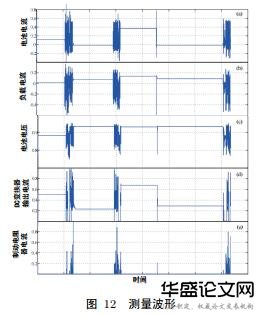
根据以上提出的电压控制方法,研制并测试了2.5T叉车的燃料电池和蓄电池混合动力系统.测量波形如图12所示,其中所有的值被标准化为
从图12(e)中可以看出,制动电阻器被开启和关闭,以保护电池由于高再生功率而免受过压.电压控制方案可以有效地调节电池电压,限制电压的过冲和下冲.
4结论本
文研究了一种应用于叉车上的燃料电池/蓄电池混合动力驱动系统.针对系统的能量管理策略进行了研究,即电池SOC控制和电池(直流母线)电压控制.在这两种控制方案中,SOC被定义为允许电池充电/放电功率的唯一因素且在叉车中电池的实际SOC很难估计,此外,在SOC的控制方案中没有考虑到温度、分层和健康状况等其他非常重要的影响因素.电池电压控制可以在不同的操作环境和电池状态(例如硫化、分层和温度等)下,特别是当负载中产生较大的再生能量时,能够更有效地抑制直流总线电压过冲,以确保系统在任何负载下的正常运行.
参考文献:
[1]王鑫.混合动力叉车动力装置参数匹配与能量控制策略研究[D].淄博:山东理工大学,2012.
[2]刘飞.燃料电池电动汽车驱动系统选型及仿真研究[D].武汉:武汉理工大学,2006.
转载请注明来自:http://www.lunwenhr.com/hrlwfw/hrgylw/9278.html