摘要 摘 要:为了实现低频水表面声波振幅准确探测和时变声信号的跟踪识别,提出了一种基于相位解调的激光干涉探测方法。该方法在参考光路中引入高频载波,利用相位生成载波技术的反
摘 要:为了实现低频水表面声波振幅准确探测和时变声信号的跟踪识别,提出了一种基于相位解调的激光干涉探测方法。该方法在参考光路中引入高频载波,利用相位生成载波技术的反正切解调算法,并结合高频载波初相位和调制深度的测定,可实现水表面声波的准确识别。在实验室环境下搭建了一套水表面声波探测系统,实验结果表明该方法对水表面声波微振幅的测量重复性不超过 1 nm。同时该系统能够实时跟踪水下声源的变化,对幅度受到正弦调制的水下声源信号进行了水表面声波振幅检测,实验结果证明了该方法识别时变声信号的正确性。
关键词:干涉;振幅检测;相位生成载波;水表面声波;相位解调
0 引 言
水面是一个复杂的表面,常常伴有船型波、振动波、热毛细波、水表面声波等波动,实现这些波动的分离提取以及波动参数的测定有着重大的意义。当水下有声源振动时,将在水表面激发水表面声波,只有与水下振动点源的振动频率相同的水表面波才具有显著的振幅[1]。在海洋科学和水利防护方面,水表面声波的测量常常与实际工程相联系 [2,3],可以运用到海底建筑的建造、海底钻井、油管铺设以及设备检测等。另一方面出于海洋工程和国防对非接触性遥感技术的需求,人们期望能在水上平台实现对水下声信号的探测,水表面声波的探测成为当下热点[4]。此外水表面声波的研究也可以运用到液体特性参数的测量当中,被测液体的粘度系数,表面张力,衰减特性等可以通过测量水表面声波间接得到。目前水表面声波探测这一方向的研究倾向于光学的非接触测量方式[4],按照探测原理的不同分为:散射光斑法、激光通量法、光线分析法、光衍射法和光干涉法[5-7]。其中,光干涉法具有探测灵敏度高、探测频带宽和高精度等优点,相对其它方法有着独特的优势。本课题组在激光相干探测水表面声波这一领域进行了较大量的研究工作,并取得了一定进展。利用频谱分析解调技术、小波分析、变向点数据分析以及参考臂低频相位调制等技术,实现了一定频率范围内水表面声波的频率和振幅的测量[8-10]。但尚有两个问题亟待解决:第一,由于水面扰动引起的噪声信号占据较宽的低频段,上述方法不能探测到 1kHz 以下的水下声源;第二,对声源特征实时变化的水下目标无法实现跟踪探测。为了解决上述两个问题,实现低频水表面声波微振幅准确探测和时变声信号的跟踪识别,本文将相位生成载波解调技术(PGC)[11,12]应用到解调算法当中。在干涉系统的参考光路当中引入高频载波对探测信号进行调制,再利用后续的反正切算法以及载波初相位补偿等环节进行相位解调,获得水表面声波的波动信息。通过后续的滤波处理,最终实现水表面声波微振幅的准确探测。
1 基本原理
1.1 激光干涉探测水表面波动原理
水表面的波动信息十分丰富,振幅范围从几纳米到几米,频率范围从几赫兹到几万赫兹。按照频率可以分为低频的大幅机械扰动、热运动毛细波和高频的水表面声波等,基于激光干涉的探测信号相位当中就包含了这些振动信息。假设水表面由环境扰动和水表面声波两部分振动组成,水表面环境扰动的振幅为 An,角频率为 ωn,初相位为 φn;水下声源引起的水表面微幅波振幅为 As,角频率为 ωs,初相位为 φs。设水表面的振动引起的相位为 P(t),激光波长为 λ,则水表面波动信息为: 4 ( ) [ sin( ) sin( )] Pt A t A t n nn s ss π ω ϕ ω ϕ λ = ++ + (1)在参考光路当中引入的高频载波调制深度为 C,角频率为 ω0,初相位 φ0的高频载波,使得干涉信号中产生高频相位。利用激光干涉系统对水表面振动进行探测,探测信号可以表示成相位为水表面波动和高频载波之和的余弦函数形式: 0 0 Ft A C t Pt ( ) cos[ cos( ) ( )] = ++ ω ϕ (2)式中 A 为探测信号的增益系数,由探测器性能和系统增益决定。根据反正切解调算法的基本原理,进行相位解调之后可以获得水表面波动信号如(3)式所示。 ( ) 2 01 1 02 ( )cos(2 ) arctan[ ] ( )cos( ) c c JC U P t JC U ϕ ϕ = ⋅ (3)式中 J1(C)和 J2(C)分别是调制深度 C 的一阶和二阶贝塞尔函数值,U1c、U2c 分别是进过一倍余弦和二倍余弦混频之后通过低通滤波器获得的信号。高频载波的调制深度 C 和初相位 φ0准确测定之后,对 P(t)进行高通滤波滤除低频环境扰动,经过提取水表面声波的振动信息就能得到水表面声波的振幅。
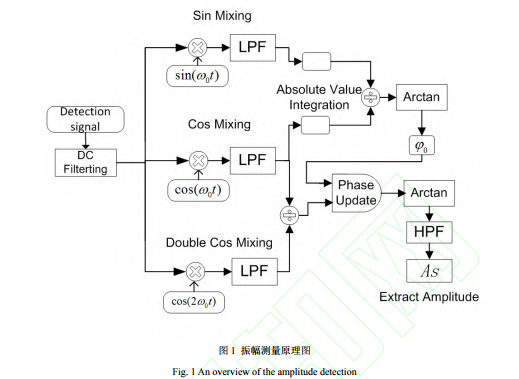
本文采用的反正切相位补偿算法如图 1 所示。干涉系统光电探测器所探测的原始信号,在滤除直流之后进行三路电子混频。探测信号与一倍正弦、一倍余弦、二倍余弦混频获得的三路信号。
这三路信号经过低通滤波器之后分别记为 U1s、 U1c、U2c: ( ) ( ) ( ) 1s 1 0 11 0 22 0 ( )sin( )sin[ ] ( )cos( )sin[ ] ( )cos(2 )cos[ ] c c U AJ C P t U AJ C P t U AJ C P t ϕ ϕ ϕ = − = − = − (4)对 U1s、U1c 两路信号的绝对值积分进行相除,得到两路信号的幅值之比,经过后续反正切函数就可得到高频载波初相位 φ0,这样利用平均数据结果减小误差。虽然这种方法会导致 φ0 的范围限制在 [0 ,pi/2]之间,但是对 cos(2φ0)/cos(φ0)只会产生正负的影响,因此对载波初相位的估计结果仍然是准确的。再利用频谱分析法得到高频载波调制深度 C 的估计,就可确定式(3)中的解调系数。用解调系数对U1c与U2c经过低通滤波器后相除得到的信号进行相位补偿,通过反正切解相(相位解包裹进行值域拓展)之后,再用高通滤波器滤除水面低频环境扰动即可获得水表面声波振幅信息。
1.2 仿真验证
对前面所述的水表面声波振幅检测方法进行数值仿真研究,设定激光波长为 632.8nm,光电探测系统增益系数 A 为 1。水面低频环境扰动的振幅、频率和初相位分别为 1000nm、3Hz、0;水表面声波的振幅、频率及初相位分别设为 30nm、600Hz、 0.5pi。在参考光路加入高频载波,参数设定为频率 f0 =10kHz,初相位 φ0=pi/6,振幅 A0=60nm,对应的调制深度 C 则为 1.2。首先利用文献[8]的方法,在不存在水表面声源的情况下,对系统设定的载波进行调制深度估计。从频谱当中计算得到低频段分量幅值之和为 1.046,这些分量频移 10kHz 之后的幅值之和为 0.719,衰减比 R 即为 1.455。根据贝塞尔函数我们得到了调制深度的估计值为 1.178,进而计算得出载波振幅为 59.33nm,这一结果与设定值 60nm 基本吻合,说明了调制深度 C 的获取方式是可行的。利用本文的算法对探测信号进行解调得到图 2 所示的结果,图 2 (a)、(c)分别表示探测信号的时域和频域信号;图 2 (b)、(d)分别表示解调结果的时域和频域信号。低通滤波器处理解调信号获得的环境扰动波解调振幅测得为 1000.12nm;通过高通滤波器得到水表面声波的振幅为 30.203nm,频率为 600Hz。仿真结果与设定值基本吻合,表明上述方法能够实现水表面声波与环境扰动波的分离,并且能够有效地解调出水表面声波振幅信息,从而验证了本文理论的正确性。
2 实验系统
为了实现水下声源引起的水表面声波探测,在光学暗室下搭建了一套水表面声波的振幅检测实验系统如图 3 所示。系统采用波长为 632.8nm 的 He-Ne 激光器作为光源,以迈克尔逊干涉光路为基础,在参考光路引入高频载波以实现相位解调。系统分为四大部分:(1) 激光干涉探测光路。He-Ne 激光经过偏振片和 1/4 拨片,再经过扩束准直透镜后在分光镜的作用下分为参考光和测量光。分别经参考水面和测量水面反射后在光电探测器处发生干涉,形成基本的迈克尔逊干涉系统;(2) 数据采集。相干光经过滤波片后被光电探测器探测,经数据采集卡传输给上位机,同时在测量水池当中加入水听器作为参考的数据也一并采集; (3) 信号处理解调部分。采集系统采集的探测信号上传到上位机,同时上位机软件对探测电信号进行解调处理,解调出水表面声波振幅;(4) 水表面声波激发模块。信号发生器输出两路信号,经过放大器后分别驱动参考水池和测量水池下的扬声器发声。测量水池的扬声器作为水下声源,参考水池的扬声器激发的水表面声波作为高频载波引入探测信号。这种高频载波的引入方式可以避免使用高价位的频移器件,节约成本;同时获得的参考光与测量光有着相近的光强,干涉效果较好;参考光路水表面也存在环境扰动,可以通过差分的方式减小环境扰动,提高系统抗干扰能力。
3 实验结果
3.1 低频水表面声波振幅检测实验
利用图 3 所示系统对水下声源进行探测,并且通过解调算法获得水表面声波的振幅。信号发生器一路通道产生 10kHz 的标准正弦信号,通过功率放大器驱动参考光路扬声器发声,使得同频的水表面声波作为高频载波引入探测系统;信号发生器的另一通道输信号驱动测量水池扬声器发声作为水下声源,测量表面产生同频的水表面声波被探测系统检测。实验前对参考光路的高频载波进行调制深度估计,测得参考光路 10kHz 水表面声波振幅为 30.21nm,对应调制深度估计为 0.6。获得的探测信号及其频谱如图 4 所示。由于被测水面存在环境扰动,水表面波动幅度较大,部分测量回光不能进入探测系统,体现为信号强度随时间变化;在频谱图当中低频带占据约 1kHz 的带宽,水表面声波频率信息被淹没在其中,高频段以载波频率 10kHz 为中心频率呈左右对称分布。文献[9]采用的频谱分析的方法不再有效,无法直接从干涉信号频谱当中分离得到水表面声波频率信息。
对水下发声频率为 800Hz 的水表面声波的振幅检测实验结果如表 1 所示。采样率为 100kS/s,观测时间为 1s;在相同发生频率和强度的条件下,进行了 8 次重复性实验,每次测量取三个区间的振幅的平均值作为本次实测振幅。由表 1 可知,八次振幅测量的平均值为 57.11nm,最大绝对偏差为 1.05nm,测量重复性为(1 倍标准差)0.78nm。可见上述解调方法对稳定声信号产生的水表面声波振幅的测量具有很高的测量重复性。
1kHz 以下的水表面声波进行了多组探测实验,在水下声信号具有相同发声强度的条件下,水表面声波在不同频率段的振幅测量结果如图 5 所示。由于受到滤波器性能的限制,高通滤波器在滤除低频干扰的同时对实验信号也进行了一定的衰减作用,因此低于 200Hz 的水表面声波振幅测量结果不再有效。根据水表面声波理论,相同发声强度情况下水下声信号频率越低,引起的水表面声波振幅越大,图中实验结果与这一理论相吻合。
虽然我们能够通过水听器获得水下发生目标的发声强度和频率的参考值,但是仍然不能获得水表面声波振幅的标准值,因此不能检验本文测量方法的正确性。虽然无法消除实验系统误差,但是对振幅测量的重复性不大于 1nm,可见本文所述方法对水表面声波的振幅测量是十分有效的。在条件具备之后,可以利用标准振动源对此方法进行校准,以消除实验系统误差。
3.2 幅度调制的水表面声波检测
一般来说,在观测时间实测信号的强度不是稳定不变的,为了验证上述测量方法具有测量时变水表面声波的能力,进行了幅度调制的水表面声波检测试验。使信号发生器产生频率为 500Hz 的正弦信号,振幅受到频率为 1Hz 的正弦调制,驱动水下扬声器发声产生水表面声波。实验采样率为 100kS/s,采样时间为 3s,实验测得的解调结果及其频谱如图 6 所示。从时域图中可以看出解调结果的信号强度呈周期性变化;从频谱图当中可以看到主频位于 500Hz 处,在 499Hz 和 501Hz 出现次高峰,这是由于正弦信号受到了 1Hz 调幅造成的频移,测量结果与实际相符。
进一步对解调结果的数据进行处理,利用 MATLAB 曲线拟合功能拟合该测试结果,得到如图 7 所示的正弦拟合曲线。图中的拟合曲线方程为: As=-37.50sin(6.22t+0.67)+44.30,可以从中得到信号周期为 1.011s,这与信号源的调幅频率 1Hz 相吻合。拟合结果符合调制信号,幅度调制信号实验测试结果表明本方法能够准确的实现时变声信号的跟踪探测。
影响本文所述振幅测量方法精度的主要因素有:(1)实验设备的稳定性。激光器、信号发生器不稳定引起的随机误差,对测量结果造成直接的影响;(2)滤波器性能。本文解调算法多处用到滤波器,滤波器通带纹波、阻带衰减以及过渡带宽都会影响解调结果的精度;(3)调制深度 C 的估计误差;(4)环境扰动、杂散光噪声、探测器噪声等随机因素造成的误差。
4 结论
针对现有水表面声波振幅探测技术存在不能测量低频信号以及时变信号的不足,本文提出一种基于相位解调的振幅测量方法。总结起来本文的结论有以下几点:(1)利用激光干涉的方式获取水表面波动信息,并且在参考光路引入高频载波。解调算法在 PGC 反正切解调的基础上,进一步计算了载波初相位和调制深度,对结果进行了相位补偿;(2)本方法能够实现 1kHz 以下的低频水表面声波振幅的探测,并且能够识别时变信号的振幅;(3)利用干涉测量系统对微弱的水表面声波进行了探测实验,实验结果表明本文所述方法能够解算出被测振动的振幅,振幅的测量重复性不大于 1nm。受到滤波器性能的影响,振幅探测的频率下限为 200Hz;
5 参考文献
[1] Dai Zhenhong, Sun Jinzuo, Sui Pengfei. Theoretical study on the water surface transversal mini-wave dui to the underwater sound field[J]. Journal of National University of Defense Technology, 2004, 26(1):95-98.(in Chinese) 戴振宏, 孙金祚, 隋鹏飞. 水下声源引起的水表面横向微波的理论研究[J]. 国防科技大学学报, 2004,26(1):95-98.
[2] Li Yimang, Gao Shijie, Sheng Lei. Experiment of restraint of atmospheric turbulence using diversity technology based on analysis of offshore laser communication [J]. Infrared and Laser Engineering, 2016,45(03):256-262. (in Chinese) 李一芒,高世杰,盛磊.近海激光通信分集技术对大气湍流扰动抑制的实验[J].红外与激光工程,2016,45(03):256-262.
相位解调实现低频水表面声波振幅探测相关论文期刊你还可以了解:《大功率激光立体成形熔道几何参数量化模型》
转载请注明来自:http://www.lunwenhr.com/hrlwfw/hrsklw/11344.html